Проблема идентификации и подходы к ее решению. Параметрическая идентификация объектов Процедура идентификации системы
Немного из теории
Для начала нужно понять, что такое динамическая система . Если говорить как можно проще, то это система, параметры которой изменяются во времени. Подробнее . Практически любую динамическую систему можно описать дифференциальным уравнением какого-либо порядка, например:Данная система дифференциальных уравнений характеризуется своими параметрами. В нашем случае это a , b , c и d . Они могут быть как статическими так и динамическими.
Что означают эти коэффициенты?
Применительно к реальным физическим динамическим системам эти коэффициенты дифференциального уравнения имеют конкретную физическую привязку. Например в системе ориентации и стабилизации космического аппарата данные коэффициенты могут играть различную роль: коэффициент статической устойчивости КА, коэффициент эффективности бортового управления, коэффициент способности изменять траекторию и т.п. Подробнее .
Так вот задача параметрической идентификации это определение этих самых коэффициентов параметров a , b , c и d .
Задача наблюдения и измерения
Стоит отметить, что для решения задачи параметрической идентификации необходимо получить «измерения» одной (или всех) фазовой координаты (в нашем случае это x 1 и (или) x 2).Для того чтобы система была идентифицируема, она должна быть наблюдаема. То есть ранг матрицы наблюдаемости должен быть равен порядку системы. Подробнее про наблюдаемость .
Наблюдение процессов, происходящих в объекте, происходит следующим образом:
- у - вектор наблюдаемых параметров;
- H - матрица связи параметров состояния и наблюдаемых параметров;
Подробнее про вектора и матрицы
Динамическую систему которую мы описывали выше, можно представить в векторно-матричной форме:
где:
- помеховая составляющая.
Измерение процессов, происходящих в объекте, описывается следующим образом:
Как мы видим погрешность измерения может быть как аддитивной (в первом случае), так и мультипликативной(во втором)
Задача идентификации
Рассмотрим решение задачи параметрической идентификации в случае когда не известен один коэффициент. Перейдем к конкретному примеру. Пусть дана следующая система:Видно, что параметры равны b = 1 , c = 0.0225 и d = -0.3 . Параметр a нам неизвестен. Попробуем дать его оценку с помощью метода наименьших квадратов.
Задача состоит в следующем: по имеющимся выборочным данным наблюдений за выходным сигналами с интервалом дискретизации Δt требуется оценить значения параметра, обеспечивающего минимум величины функционала невязки между модельными и фактическими данными.
Где - невязка, определённая как разность между выходом исследуемого объекта и реакцией, вычисленной по математической модели объекта.
Невязка складывается из неточностей структуры модели, погрешностей измерений и неучтённых взаимодействий среды и объекта. Однако, независимо от природы возникающих ошибок, метод наименьших квадратов минимизирует сумму квадратичной невязки для дискретных значений. В принципе, МНК не требует никакой априорной информации о помехе. Но для того, чтобы полученные оценки обладали желательными свойствами, будем предполагать, что помеха является случайным процессом типа белого шума.
Оценка по методу наименьших квадратов, минимизирующая критерий J , находится из условия существования минимума функционала:
Важным свойством оценок по МНК является существование только одного локального минимума, совпадающего с глобальным. Поэтому оценка является единственной. Ее значение определяется из условия экстремума функционала J :
То есть необходимо от функционала взять производную по a и приравнять ее к нулю.
Обращаю внимание, что - это «измеренные» значения фазовых координат и (или) , а - это фазовые координаты и (или) вычисленные по математической модели объекта. Но ведь в модели объекта, представленной в виде системы дифференциальных уравнений, и не выражены в явном виде. Для того, чтобы избавиться от этого безумия необходимо решить данную систему дифференциальных уравнений с заданными начальными условиями.
Решать можно как «вручную», так и используя какое-либо программное обеспечение. Ниже будет показано решение в MatLab. В итоге должна получится система алгебраических уравнений для каждого момента времени :
Затем подставляя вместо значения «измеренных» фазовых координат, находим оценку параметра для каждого момента времени .
Где взять эти «измеренные» значения фазовых координат?
Вообще эти значения берутся из эксперимента. Но так как мы никакой эксперимент не проводили, то возьмем эти значения из численного решения нашей системы дифференциальных уравнений методом Рунге-Кутта 4-5 порядка. Выберем параметр
Решение найдем встроенными функциями пакета MatLab. Подробнее . Решение данным методом показано ниже.
% обозначим тип переменных
syms x(t) y(t) a
% решим систему при заданных начальных условиях
S = dsolve(diff(x) == a*x + 1*y,"x(0)=20", diff(y) == 0.0225*x - 0.3*y,"y(0)=20");
% выберем решение первой фазовой координаты, так как именно в его уравнении
% содержится искомый параметр а
x(t) = S.x;
% найдем частную производную первого уравнения по параметру а (в
% соответствии с методом МНК)
f=diff(x(t),"a");
% теперь немного упростим получившееся выражение
S1=simplify(f);
% зададим переменной t массив значений T
t=T;
% найдем выражения, содержашие параметр а для каждого момента времени
SS=eval(S1);
% теперь в цикле, подставляя в каждое выражение значение «измеренной»
% первой фазовой координаты, определим параметр а для каждого момента
% времени T. Значения «измеренной» фазовой координаты берем из решения СДУ
% методом Рунге-Кутта 4-ого порядка
for i=2:81
SSS(i)=solve(SS(i)==X(i,1),a);
end
ist=zeros(length(T),1);
ist(1:length(T))=-0.7;
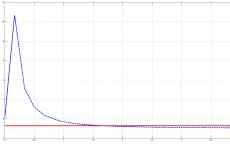
figure; plot(T,SSS,"b--",T,ist,"r-");
legend ("оценка параметра а","истинное значение");
grid on;

На графике синей пунктирной линией обозначена оценка параметра , а красной сплошной линией обозначено непосредственно «истинное» значение параметра модели . Мы видим, что примерно на 3,5 секунде процесс стабилизируется. Небольшое расхождение оценки параметра и «истинного» значения вызвано ошибками при решении системы дифференциальных уравнений методом Рунге-Кутта.
Как уже указывалось выше, число работ и разнообразие методов идентификации делает практически невозможной достаточно полную их характеристику. Одним из рациональных подходов в этих условиях является отбор методов параметрической идентификации по их целевой направленности, т. е. зависимости от свойств объектов, отражением которых являются модели определенных классов. Растригиным Л.А. предложена, например, следующая классификация моделей под этим углом зрения:
- статические или динамические;
- детерминированные или стохастические;
- линейные или нелинейные;
- непрерывные или дискретные.
Признаки классификации методов
При определении вида оператора связи между входом и выходом объекта в зависимости от его свойств выбирается либо один из приведенных выше типов моделей, либо некоторая их комбинация, что, в свою очередь, используется при выборе наиболее приемлемых методов параметрической идентификации, в основу классификации которых положены следующие признаки:
- активность (пассивные и активные методы);
- адаптивность (неадаптивные и адаптивные);
- дискретность (непрерывные и дискретные, т. е. шаговые).
Как видно из приведенных классификации, число возможных сочетаний моделей и методов довольно велико, но и оно не исчерпывает всего многообразия реальных ситуаций, хотя, безусловно, вносит определенную целенаправленность в процесс выбора методов. Например, идентификация объекта, описываемого статической, детерминированной, линейной моделью осуществляется более простыми методами, чем для случая динамической стохастической нелинейной модели. Из-за невозможности рассмотреть все промежуточные случаи ниже мы остановимся лишь на некоторых из них, наиболее характерных применительно к металлургическим объектам.
Параметрическая идентификация для случая статической детерминированной модели
Допустим, что поведение объекта описывается регулярной зависимостью, связывающей вход и выход объекта:.
Тогда модель объекта также должна представлять собой некоторую регулярную функцию.
Рассмотрим сначала случай линейной модели объекта с входами и выходами, которая имеет единственно возможную структуру и описывается системой линейных алгебраических уравнений:
 где идентифицируются коэффициентов
где идентифицируются коэффициентов
Неизвестная функция объектав виде известной функции с неизвестными параметрами .
Для определения неизвестных параметров приравнивают состояния модели и объекта для каждого из наблюдений
Где, – число оцениваемых параметров.
Аналитическое решение
Решение такой системы (в общем случае трансцендентных уравнений) сводится, как и в линейном случае, к задаче минимизации суммарной невязки
![]() . (5.76) Если структура модели выбрана в классе дифференцируемых функций, то эта задача представляется в виде системы уравнений с неизвестными:
. (5.76) Если структура модели выбрана в классе дифференцируемых функций, то эта задача представляется в виде системы уравнений с неизвестными:
Такого рода аналитическое решение задачи часто представляет значительные вычислительные трудности, в связи с чем обращаются к поисковым методам минимизации. Для этого организовывается рекуррентный процесс ![]() , где– шаг, определяемый алгоритмом поиска.
, где– шаг, определяемый алгоритмом поиска.
При правильном выборе алгоритмаэтот процесс должен сходиться к точным значениям параметров, т. е. к решению задачи (5.76)
Особенности адаптивных методов идентификации применительно к нелинейным моделям
Рассмотрим особенности адаптивных методов идентификации применительно к нелинейным моделям.
Локальная невязка выходов модели и объекта имеет для непрерывного случая вид:
![]() Минимизация ее квадрата градиентным методом приводит к следующему алгоритму:
Минимизация ее квадрата градиентным методом приводит к следующему алгоритму:
![]() . (5.77) где.
. (5.77) где.
Структурная схема, реализующая этот алгоритм, представлена на рис. 5.15, сравнение которого с рис. 5.14 показывает, что последний алгоритм отличается от случая линейной модели наличием функционального преобразователя , предназначенного для определения вектора

Рис. 5.15 Схема адаптивной идентификации нелинейных объектов
Адаптивно шаговый метод
Рассмотренный случай касался адаптивного алгоритма идентификации для непрерывных объектов. Остановимся теперь на особенностях адаптивного шагового метода, который целесообразно применять для дискретных объектов (при дискретном способе получения информации о состоянии объекта). Локальная невязка в этом случае имеет вид:
![]() . (5.78) а рекуррентный алгоритм представляется формулой
. (5.78) а рекуррентный алгоритм представляется формулой
. (5.79) где.
Параметр выбирается из соображений оптимизации работы алгоритма. Определим его для предельного случая, когда структура модели и объекта совпадают, т. е.
![]() . (5.80) Подставив в формулы (5.78) и (5.79) соотношение (5.80) и выражение для вектора невязки параметров , после некоторых преобразований получаем уравнение, отражающее изменение в процессе идентификации:
. (5.80) Подставив в формулы (5.78) и (5.79) соотношение (5.80) и выражение для вектора невязки параметров , после некоторых преобразований получаем уравнение, отражающее изменение в процессе идентификации:
Тогда выражение для квадрата невязки имеет вид:
Из условия минимизации этого выражения (дифференцированием по и приравниванием нулю) и находится оптимальное значение параметра :
. (5.81) Тогда оптимальный алгоритм адаптивной шаговой идентификации принимает вид:
 . (5.82) Определяемдля этого случая. Подставив (5.82) в (5.78), получаем:,
. (5.82) Определяемдля этого случая. Подставив (5.82) в (5.78), получаем:,
т. е. прилокальная невязка на каждом шаге идентификации уменьшается до нуля.
При активной идентификации векторы на каждом шаге выбираются таким образом, чтобы они были ортогональны друг другу, т. е.
 В этом случае процесс идентификации должен заканчиваться за шагов, естественно, если речь идет о детерминированной модели, так как при наличии помех скорость сходимости процесса идентификации существенно зависит от их уровня, что будет показано ниже.
В этом случае процесс идентификации должен заканчиваться за шагов, естественно, если речь идет о детерминированной модели, так как при наличии помех скорость сходимости процесса идентификации существенно зависит от их уровня, что будет показано ниже.
Параметрическая идентификация стохастических объектов
Случай статического стохастического объекта
Сначала рассмотрим случай статического стохастического объекта, который может быть представлен в виде:
![]() . (5.83) где – вектор случайных факторов, порожденных либо самим объектом, либо средствами сбора и передачи информации.
. (5.83) где – вектор случайных факторов, порожденных либо самим объектом, либо средствами сбора и передачи информации.

Рис. 5.16 Схема объекта с аддитивным наложением помех
Для простоты остановимся на таких объектах (рис. 5.16), у которых регулярная и случайная составляющие могут быть разделены, т. е. представлены в виде:
![]() . (5.84) где
. (5.84) где
При этом предполагается, что свойства случайной составляющей не зависят от входа , т. е. полностью оцениваются определенной плотностью вероятности , в качестве которой часто принимают нормальный закон.
Тогда для объекта с одним входом , когда , плотность нормального распределения характеризуется двумя параметрами: математическим ожиданием и дисперсией
![]() В двухмерном случае нормальный закон распределения характеризуется пятью параметрами: двумя средними значениями
В двухмерном случае нормальный закон распределения характеризуется пятью параметрами: двумя средними значениями
; двумя дисперсиями
![]() . и корреляционным моментом
. и корреляционным моментом
![]() .
.
Процедура декорреляции
Идентификация объектов с несколькими выходами значительно затрудняется при наличии корреляции помех, действующих на разные выходы. Преодолеть этот недостаток можно с помощью процедуры «декорреляции», смысл которой состоит в следующем.
Пусть и – коррелированные случайные величины с нулевыми средними, дисперсиями , и корреляционным моментом , который предполагается известным. Образуем путем линейного преобразования новые случайные величины:
![]() ;
; ![]() .
.
 . (5.87) Из сравнения этого выражения с соотношением (5.81) для детерминированного случая можно видеть, что сходимость адаптивного процесса идентификации для стохастического объекта в значительной мере зависит от статистических свойств помехи .
. (5.87) Из сравнения этого выражения с соотношением (5.81) для детерминированного случая можно видеть, что сходимость адаптивного процесса идентификации для стохастического объекта в значительной мере зависит от статистических свойств помехи .
Следует заметить, что прямо воспользоваться этим выражением для адаптивной идентификации нельзя, так как неизвестен вектор невязки параметров , поскольку неизвестны параметры модели, которые мы и пытаемся оценить с помощью искомого алгоритма. Получается как бы замкнутый круг. Однако это препятствие можно обойти путем замены на , которые отличаются на и, следовательно, в среднем совпадают. Тогда приближенно имеем:
 А алгоритм адаптивной идентификации стохастического объекта примет следующий вид:
А алгоритм адаптивной идентификации стохастического объекта примет следующий вид:
 . (5.88)
. (5.88)
Вопрос сходимости для непрерывного объекта
Выше рассмотрен случай пассивной адаптивной идентификации. Если имеется возможность активного воздействия на объект, то выбор вектора ортогонального предыдущим векторам способствует ускорению сходимости процесса, но из-за наличия помехи все же не гарантирует окончания идентификации за конечное число шагов.
Для случая непрерывного объекта и метода вопрос сходимости алгоритма решается проще, чем для шагового метода. Сходимость здесь обеспечивается при условии и достаточной вариабельности вектора . Скорость сходимости прямо пропорциональна , но при очень большом его значении может возникать неустойчивость. Структурная схема алгоритма не отличается от приведенного на рис. 4.14 и 5.15 соответственно для линейной и нелинейной моделей.
Динамические модели
Параметрические и непараметрические модели
Рассмотрим методы идентификации объектов, оператор которых имеет память, т. е. выход в момент отражает не столько состояние входа в этот момент, сколько его значения в предыдущие моменты времени.
Следует различать параметрические и непараметрические модели объектов. В первом случае модель определяется набором параметров (коэффициентов), которые оцениваются в процессе идентификации. Непараметрическая же модель определяется, в общем случае, непрерывной функцией (чаще всего функцией времени). Однако она может быть задана также точками или в виде разложения в ряд по некоторой системе функций. В последнем случае мы опять приходим к параметрической модели.
Линейная параметрическая модель для одномерного случая
Линейная параметрическая модель для одномерного случая представляет обыкновенное дифференциальное уравнение вида
![]() . (5.89) Часто эту модель удобно записать в виде системы дифференциальных уравнений, для чего вводятся новые переменные
. (5.89) Часто эту модель удобно записать в виде системы дифференциальных уравнений, для чего вводятся новые переменные
В результате получаем систему уравнений вида:
 . (5.90) В векторной форме эта модель имеет вид:
. (5.90) В векторной форме эта модель имеет вид:
Линейная параметрическая модель с числом входов больше единицы
При числе входов больше единицы для случая линейной модели вектор состояния образуется как сумма векторов:
Где вектор ![]() отражает состояние – того входа.
отражает состояние – того входа.
Тогда уравнение для линейной динамической системы с несколькими входами имеет вид:
![]() Исходной информацией для идентификации являются состояние входов и выхода объекта в интервале времени .
Исходной информацией для идентификации являются состояние входов и выхода объекта в интервале времени .
Как и в предыдущих случаях, задачу идентификации можно свести к минимизации функции невязки в виде квадрата разности правой и левой частей уравнения (5.89) при подстановке в него функций и наблюдений объекта
 . (5.92) Задача минимизации формулируется в виде
. (5.92) Задача минимизации формулируется в виде
И сводится к решению системы уравнений, образующихся в результате приравнивания нулю частных производных:
; . После преобразований получаем следующую систему линейных алгебраических уравнений:
![]()
![]() ;
; ![]() ; где,
; где,  .
.
 ;
;  ; В представленном непрерывном виде система относительно просто решается на аналоговых и гибридных ЭВМ.
; В представленном непрерывном виде система относительно просто решается на аналоговых и гибридных ЭВМ.
Сложности связанные с дискретностью объекта
Решение этой задачи усложняется при дискретном характере объекта или способа получения информации. Здесь возникают дополнительные погрешности, связанные с численным интегрированием и дифференцированием, для чего используются специальные подпрограммы, входящие в состав математического обеспечения современных ЭВМ. Погрешность численного дифференцирования можно снизить применением специальных методов сглаживания исходных сигналов.
Адаптивная идентификация динамической нелинейной модели
Математическое описание модели
Остановимся теперь на случае адаптивной идентификации динамической нелинейной модели. Пусть– известная функция с неизвестными параметрами![]() .
.
Система уравнений![]() решается либо в непрерывном виде на АВМ либо численно интегрируется на ЦВМ (например, методом Рунге – Кутта) при заданных начальных условиях и фиксированных значениях идентифицируемых параметров. Полученное решение
решается либо в непрерывном виде на АВМ либо численно интегрируется на ЦВМ (например, методом Рунге – Кутта) при заданных начальных условиях и фиксированных значениях идентифицируемых параметров. Полученное решение
Сопоставляется с наблюдаемым значением , а образующаяся при этом невязка вида
 минимизуется в зависимости от искомых параметров
минимизуется в зависимости от искомых параметров ![]() .
.
При адаптивном методе идентификации невязка в момент представляется в виде ![]() и минимизируется в каждый момент времени
и минимизируется в каждый момент времени ![]() .
.
Методы решения, структура системы
Эта задача может быть решена с использованием поисковых методов оптимизации (рис. 5.17).

Рис. 5.17 Структурная схема поисковой идентификации
При этом мы не касаемся конкретной реализации алгоритмов блока минимизации, так как они зависят от постановки задачи, свойств реальных объектов и могут требовать в сложных случаях больших затрат вычислительных средств. В отношении же общей структуры системы (рис. 5.17) следует отметить, что наличие в ней операторов дифференцированияи, способных усиливать помехи (особенно высокочастотные), приводит к необходимости применения соответствующих методов и устройств и для сглаживания исходных сигналов и .
Проблема сглаживания и фильтрации
Проблема в общем случае
Проблема сглаживания и фильтрации в общем случае является достаточно сложной, ей посвящено много работ, обзор которых выходит за рамки данного пособия. Основной задачей в этой проблеме является выбор такого оператора сглаживающего фильтра, который бы наилучшим образом подавлял помеху (ее статистические свойства, в том числе частотные, должны быть известны), в наименьшей степени искажая полезный сигнал.
Случай значительного различия между помехами и полезным сигналом
В самом простом случае, когда частотные характеристики полезного сигнала и помехи существенно различны, эту задачу можно решить, пропуская исходный сигнал, например , через инерционное звено, описываемое дифференциальным уравнением первого порядка
![]() . (5.93) Схема реализации такого фильтра представлена на рис. 5.18. Здесь же приведено его дифференциальное уравнение и соотношение для настройки параметров, его реакция на ступенчатый входной сигнал и два примера преобразования исходного сигнала в сглаженный .
. (5.93) Схема реализации такого фильтра представлена на рис. 5.18. Здесь же приведено его дифференциальное уравнение и соотношение для настройки параметров, его реакция на ступенчатый входной сигнал и два примера преобразования исходного сигнала в сглаженный .
 , что может привести к необходимости выбора значительно более сложной структуры фильтра, однако эта задача выходит за рамки нашего рассмотрения.
, что может привести к необходимости выбора значительно более сложной структуры фильтра, однако эта задача выходит за рамки нашего рассмотрения.
Идентификация непараметрической модели
Описание поведения объекта
Остановимся теперь на методе идентификации для случая непараметрической модели, которая может представляться в виде импульсной (весовой) переходной функции, амплитудной и фазовой характеристик. Известно, что свойства линейного динамического объекта однозначно определяются его реакцией на единичное импульсное возмущение (см. рис. 5.6,а). В этом случае поведение объекта описывается интегралом свертки

Алгоритм для стохастического случая
Аналогом этого уравнения для стохастического случая, когда ко входу объекта наряду с полезным сигналом приложена помеха, является уравнение статистической динамики (5.57)  , в котором роль входного и выходного сигналов играют соответственно автокорреляционная функция входаи взаимная корреляционная функция выхода и входа .
, в котором роль входного и выходного сигналов играют соответственно автокорреляционная функция входаи взаимная корреляционная функция выхода и входа .
Более подробно эти вопросы, в том числе для случая перехода от непараметрической к параметрической форме модели рассмотрены в разделе 3; здесь мы обратились к ним из соображения цельности представления о методах идентификации.
Представление нелинейных динамических объектов линейными моделями
Примечательные модели подобного рода
Ниже рассмотрим случаи, когда нелинейные динамические объекты могут быть представлены моделями линейными относительно идентифицируемых параметров. В этом случае удается построить относительно простые и в то же время достаточно эффективные алгоритмы идентификации. Среди моделей такого рода следует выделить модели Вольтерра и Гаммерштейна.
Модель Вольтерра
Модель Вольтерра связана с рядом, названным его именем, которым представляется выход нелинейной динамической системы
. (5.96) Ряд Вольтерра является функциональным обобщением ряда Тейлора, его первый член отражает линейные динамические свойства объекта, второй – квадратические, третий кубические и т. д.
Для удобства идентификации целесообразно представить эту задачу в параметрической форме в виде разложения по определенной системе функций. Линейную часть представим следующим образом:
![]() , а нелинейную – в виде:
, а нелинейную – в виде:
![]() . Подставляя эти выражения в (5.96), получаем:
. Подставляя эти выражения в (5.96), получаем:
![]() . (5.97) где
. (5.97) где

Задача идентификации сводится, таким образом, к определению параметров разложения (5.97), общее число которых.
Интегральная невязка в этом случае имеет следующий вид:
 . Задача ее минимизации, как и в предыдущих случаях, сводится к системе линейных алгебраических уравнений, конкретную реализацию которых мы здесь не приводим.
. Задача ее минимизации, как и в предыдущих случаях, сводится к системе линейных алгебраических уравнений, конкретную реализацию которых мы здесь не приводим.
Если идентификация осуществляется в темпе с процессом или используется последовательно поступающая информация, то более удобен алгоритм адаптивной идентификации. В этом случае образуется локальная невязка
Рис. 5.19 Представление стохастического объекта
Связь стохастичности с точностью измерений
Стохастичность объекта связывается, таким образом, с точностью измерений его входа и выхода, в то время как идентифицируемый оператор предполагается детерминированным. В действительности же случайная помеха может входить и в оператор объекта (внутренняя помеха), т. е.
. (5.98) Для учета этого факта необходимо знать характер взаимодействия помехи с объектом, т. е. его структуру. Часто такой информации нет, поэтому целесообразно привести помеху ко входу и выходу объекта, в результате чего имеем:
![]() . (5.99) Такая аппроксимация выражения (5.98) для большинства задач оказывается оправданной. Задачей идентификации является определение модельного оператора (в идеальном случае близкого к), связывающего фактические значения входов и выходов объекта, т. е. по информации об измеряемых значениях и .
. (5.99) Такая аппроксимация выражения (5.98) для большинства задач оказывается оправданной. Задачей идентификации является определение модельного оператора (в идеальном случае близкого к), связывающего фактические значения входов и выходов объекта, т. е. по информации об измеряемых значениях и .
Фильтрация помех
Распространенным подходом к решению задачи синтеза такого оператора является фильтрация помех, что позволяет в ряде случаев приблизить измеренные значения и к истинным , . Для этой цели можно воспользоваться одним из методов фильтрации, которые выбираются, главным образом, в зависимости от характера помехи и ее отношения к полезному сигналу.
Если характер помехи позволяет отфильтровать ее до определенного допустимого уровня, то дальнейшая идентификация может производиться таким же образом, как и в случае детерминированных динамических объектов. Но такой подход не всегда возможен, так как для эффективной фильтрации помех необходимо знать их свойства. При этом, если спектральные характеристики полезного сигнала и помехи близки, то вместе с помехой можно отфильтровать и полезный сигнал, несущий информацию о свойствах объекта. В подобных случаях необходимо использовать другие методы, которые основываются либо на усреднении помех, либо на выборе определенного вида пробных воздействий. Один из таких методов, относящийся к первому подходу, был рассмотрен в разделе 5.3 (см. уравнение статистической динамики и его приложения), там же мы коснулись вопроса нанесения пробных воздействий для детерминированного случая (или близкого к таковому). При наличии же существенного уровня помех эта проблема значительно усложняется, так как для выбора характера пробных сигналов необходимо учитывать свойства объектов и помех.
Цель : дать представление об активных и пассивных методах структурной и параметрической идентификации, типовых структурах объекта управления, их особенностях.
Основные определения
Модель
- условный образ объекта исследования, получаемый для того, чтобы отобразить характеристики объекта, существенные для исследователя. Модели могут быть физическими (например, уменьшенная модель корабля для исследования его гидродинамических свойств в специальном бассейне) и математическими. По своему виду математические модели могут быть:
- символьные (в виде математических формул);
- графические;
- операционно-описательные (заданные, например, в виде алгоритмов);
- топологические или иконографические (задаются в виде графа или некоторой схемы).
Моделирование - метод исследования процессов или явлений на их моделях (математических или физических).
Математическое моделирование - метод исследования процессов или явлений путем построения их математических моделей и исследования этих моделей с помощью вычислительной техники.
Имитационное моделирование -метод математического моделирования, при котором используют прямую подстановку чисел, имитирующих внешние воздействия (часто случайные), параметры и переменные процессов, в математические модели объектов.
Идентификация модели - в соответствии с ГОСТ 20913-75 это определение параметров и структуры математической модели, обеспечивающей наилучшее совпадение выходных координат объекта и модели при одинаковых входных воздействиях. Иными словами идентификация - процедура построения модели объекта по результатам измерения и обработки входных и выходных сигналов объекта. Подход к построению модели на основе идентификации называют также экспериментальным подходом, в отличие от аналитического, когда модель выводится на основании основных законов физики, химии, электротехники, материального или энергетического баланса.
«Черный ящик» - система, у которой при неизвестной внутренней организации, структуре и поведении элементов имеется возможность наблюдать реакцию выходных величин на изменение входных воздействий. Если структура объекта известна, то используют термин «серый ящик».
Параметрическая идентификация - определение параметров модели при заданной ее структуре.
Априорная модель - модель, построенная до начала специальных экспериментальных исследований.
Апостериорная модель - модель, полученная или уточненная по результатам экспериментальных исследований.
Классификация методов идентификации
В зависимости от принятого критерия классификации можно по-разному выделить и сгруппировать подходы и методы идентификации. Рассмотрим разные виды классификации.
1. Классификация по объему исходной информации об исследуемом объекте
:
- Методы непараметрической идентификации (идентификации в широком смысле), когда неизвестна структура объекта.
- Методы параметрической идентификации (идентификации в узком смысле), когда стоит задача оценки параметров модели известной структуры.
- Методы активного эксперимента. Имеется возможность целенаправленно формировать входные воздействия для исследуемого объекта. Для получения статических моделей существует целое научное направление, которое так и называется - «Планирование эксперимента».
- Методы пассивного эксперимента. При этом исследователь может наблюдать и обрабатывать входные и выходные сигналы объекта, но не может вмешаться в его функционирование. Отметим, что пассивный эксперимент возможен почти всегда, а вот активный эксперимент для многих исследуемых объектов и процессов провести нельзя.
4. Классификация по оперативности получения модели :
- Методы ретроспективной идентификации. В этом случае вначале проводится эксперимент, собираются и затем обрабатываются статистические данные, в итоге получается модель объекта.
- Методы адаптивной идентификации, или идентификация в темпе со временем. Алгоритмы идентификации включаются в состав системы управления. Модель объекта пересчитывается с появлением новых данных.
- линейные и нелинейные;
- стационарные и нестационарные;
- одномерные и многомерные;
- с сосредоточенными и с распределенными параметрами;
- непрерывные и дискретные;
- статические и динамические;
- детерминированные и стохастические и т.д.
6. Классификация по виду математической модели . В теории управления используются различные виды математического описания одного и того же объекта: дифференциальные уравнения, передаточные функции, весовые (импульсные переходные) функции, переходные функции, частотные характеристики. Поэтому можно классифицировать методы идентификации по тому, на нахождение какого вида модели они нацелены.
7. Классификация по используемо му математическому аппарату . Для построения математических моделей могут использоваться корреляционные методы, регрессионный анализ, частотные методы, теория оценивания, графоаналитические методы и многие другие разделы современной теории управления.
Процедура идентификации системы
Конструирование моделей по данным наблюдений включает три основных компонента:
1. Данные наблюдений . Входные и выходные данные иногда регистрируются в процессе проведения целенаправленных идентификационных экспериментов, когда пользователь может определить перечень и моменты измерения сигналов, причем некоторые из входных сигналов могут быть управляемыми. Задача планирования экспериментов, таким образом, состоит в том, чтобы, учитывая возможные ограничения, выбрать максимально информативные данные о сигналах системы. В некоторых случаях пользователь может быть лишен возможности влиять на ход эксперимента и должен опираться на данные нормальной эксплуатации.
2. Множество моделей . Множество моделей-кандидатов устанавливается посредством фиксации той группы моделей, в пределах которой мы собираемся искать наиболее подходящую. Несомненно, это наиболее важная и в то же время наиболее трудная часть процедуры идентификации. Именно на этом этапе знание формальных свойств моделей необходимо соединить с априорным знанием, инженерным искусством и интуицией. Множество моделей иногда становится результатом тщательного моделирования, после чего на основе законов физики и других достоверных знаний формируется модель, включающая физические параметры с еще не определенными значениями. Другая возможность состоит в том, чтобы без всякого физического обоснования использовать стандартные линейные модели. Множество таких моделей, у которых параметры рассматриваются прежде всего как варьируемые средства подстройки моделей к имеющимся данным и не отражают физики процесса, называется «черным ящиком». Множество моделей с настраиваемыми параметрами, допускающими физическую интерпретацию, называют «серыми ящиками».
3. Определение на основе данных наблюдений «наилучшей» модели множества . Эта часть есть собственно метод идентификации. Оценка качества модели связана, как правило, с изучением поведения моделей в процессе их использования для воспроизведения данных измерений.
Подтверждение модели. В результате осуществления всех трех этапов процедуры идентификации мы получаем конкретную модель: одну из множества, причем такую, которая в соответствии с выбранным критерием наилучшим образом воспроизводит данные наблюдений.
Остается проверить, «достаточно ли хороша» модель, т.е. выполняет ли модель свое предназначение. Такие проверки известны под названием процедур подтверждения модели. К ним относятся различные процедуры оценивания соответствия моделей данным наблюдений, априорной информации и поставленной прикладной цели.
Неудовлетворительное поведение модели по каждому из этих компонентов заставляет нас отказываться от модели, тогда как хорошее ее функционирование создает определенную степень доверия к модели. Модель никогда нельзя считать окончательным и истинным описанием системы. Ее скорее можно рассматривать как способ достаточно хорошего описания тех аспектов поведения системы, которые представляют для нас наибольший интерес.
Процедура идентификации системы порождает следующую естественную логику действия: 1) собрать данные; 2) выбрать множество моделей; 3) выбрать наилучшую в этом множестве модель. Однако вполне вероятно, что первая из так найденных моделей не выдержит проверки на этапе подтверждения. Тогда нужно вернуться и пересмотреть различные шаги процедуры.
Существует несколько причин несовершенства моделей:
Численный метод не позволяет найти наилучшую по выбранному критерию модель;
Критерий выбран неудачно;
Множество моделей оказалось неполноценным в том смысле, что в этом множестве вообще нет «достаточно хорошего» описания системы;
Множество данных наблюдений не было достаточно информативным для того, чтобы обеспечить выбор хороших моделей.
По существу, главным в приложениях идентификации является итеративное решение всех этих вопросов, особенно третьего, на основе априорной информации и результатов предыдущих попыток.
Модели объекта управления
Тестовый сигнал необходимо выбирать с такой спектральной характеристикой, чтобы действующее значение сигнала в любом интервале частот многократно превышало соответствующую величину помехи . Граничная частота спектра тестового сигнала должна быть выше наибольшего по абсолютной величине полюса передаточной функции объекта. Для получения хорошего отношения сигнал/шум амплитудная характеристика спектра тестового сигнала не должна иметь сильных провалов в интересующей области частот, чтобы обеспечить достаточно большое отношение сигнала к шуму.
На рис. 4 приведены наиболее распространенные тестовые воздействия и их спектральные характеристики.
Рис. 4. Типовые тестовые воздействия: а - ступенчатое; б - прямоугольный импульс; в - двойной прямоугольный импульс; г - синусоидальное
Верхнюю граничную частоту спектра тестового сигнала выбирают выше частоты ω 180 , на которой фазовый сдвиг выходного синусоидального сигнала объекта относительно входного составляет -180˚.
Нижняя граница диапазона, в котором необходимо достаточно точно идентифицировать передаточную функцию объекта, должна быть примерно на порядок ниже частоты ω 180 .
Ширина спектра и мощность тестового сигнала существенно влияют на точность идентификации. В общем случае более мощные и широкополосные сигналы позволяют определить большее число параметров передаточной функции.
Очевидно, что ни один из приведенных сигналов в полной мере не соответствует перечисленным требованиям. Для повышения точности идентификации можно рекомендовать, например, выполнить эксперименты со ступенчатым воздействием, а затем с двойным импульсным.
«Моделирование систем»
1 Методы параметрической идентификации объектов управления.
2 Методы структурной идентификации объектов управления.
3 Методы математической обработки экспериментальной информации (регрессионный анализ).
4 Методы планирования эксперимента (полный факторный эксперимент).
5 Аналитический метод построения математических моделей на основе мгновенных балансов потоков веществ и энергии.
1 Методы параметрической идентификации объектов управления.
структурную и параметрическую идентификацию.
На этапе параметрической идентификации выполняется экспериментальная проверка модели.
Цель параметрической идентификации: уточнение (подстройка) внутренних параметров, когда с помощью структурной идентификации не удается достичь необходимой адекватности модели реальному объекту.
Используют критерии: модульный, квадратичный, показательный, минимаксный, взвешенный критерии. Задача сводится к оценке суммарной невязки, которая служит основным критерием, по нему проводится идентификация модели.
Если относительная квадратичная невязка не превышает 5% от суммы квадратов экспериментальных значений выходного параметра объекта, то модель считается адекватной.
Методы параметрической идентификации
Методы различают в зависимости от модели.
Модели бывают:
1. Статические и динамические.
2. Детерминированные и стохастические.
3. Линейные и нелинейные.
4. Непрерывные и дискретные.
Идентификация делится:
1. Активные и пассивные методы.
2. Непрерывные и дискретные.
Параметрическая идентификация для статической детерминированной модели y = F (x )
Модель объекта линейная, имеет n входов, m выходов и структуру, описываемую системой уравнений, которая в векторной форме имеет вид:
Y = B 0 + BX .
Допустим, модель имеет несколько входов и один выход, содержит число k = n + 1 неизвестных параметров.
Рассмотрим неадаптивный шаговый метод применительно к решению этой задачи. Суть метода: приравниваются выходы объекта и модели в каждом из n опытов, в результате получается система из N уравнений идентификации с n +1 неизвестными, которая имеет однозначное решение, если ранг матрицы равен n + 1..
Это условие может быть нарушено, если ряд факторов в некоторых опытах окажутся стабилизированными, например, по условию технологии. Тогда увеличивают число опытов, активно вмешиваются в работу объекта, либо снижают число идентификационных параметров.
В качестве критерия идентификации используется суммарная невязка модели и объекта.
Рассмотрим адаптивный шаговый метод. Суть метода: значение параметров модели связываются на двух следующих друг за другом шагах:
где J – алгоритм адаптации.
В качестве такого алгоритма часто используют метод наискорейшего спуска.
Достоинства метода: возможность использования текущей информации.
Недостаток: возникают проблемы сходимости процесса адаптации.
Параметрическая идентификация нелинейных моделей
Структуру нелинейной модели предполагают в виде суммы линейных и нелинейных частей. В связи с этим алгоритм аналогичен линейному, только необходимо учесть нелинейность модели.
Объект отражается в виде функции F (X , B ) с неизвестными параметрами B .
Неизвестная функция объекта F 0 (X ) представлена в виде известной функции с неизвестными параметрами Y = F (X , B ). Чтобы определить неизвестные параметры B , приравнивают состояние модели и объекта для каждого из наблюдений. Решение сводится к задаче минимизации суммарной невязки:
2 Методы структурной идентификации объектов управления.
Идентификация объектов - построение оптимальных математических моделей по реализации их входных и выходных параметров.
Задача идентификации: количественная оценка степени идентичности модели реальному объекту.
В зависимости от априорной (исходной) информации об объекте различают структурную и параметрическую идентификацию.
Предметом структурной идентификации является определение вида функции Y теор связывающей входные переменные Х . Структурная идентификация включает в себя: постановку задачи; выбор структуры модели и её математическое описание; исследование модели.
Задачи вскрытия структуры объекта:1) выделение объекта из среды; 2) ранжирование входов и выходов объекта по степени их влияния на конечный целевой показатель; 3) определение рационального числа входов и выходов объекта, учитываемых в модели; 4) определение характера связи между входом и выходом модели объекта.
1) Выделение объекта из среды определяется целями, для которых строится модель. Модель строится так, чтобы она имела минимум связей с внешней средой. В зависимости от информации об объекте осуществляют переход к более сложной форме объекта. Далее происходит расширение объекта за счет присоединения части среды и этот процесс повторяется до тех пор, пока не будут эффективно достигаться цели управления.
ЦВМ открыли большие возможности для использования информации, снимаемой с объекта, для улучшения качества управления или характеристик регулятора. Широкое распространение получили адаптивные, самонастраивающиеся системы, в которых реализуется автоматическая подстройка параметров системы на основе анализа и обработки информации об эффективности процесса регулирования.
Рис. 9.1. Общая схема адаптивной системы управления (r, u - входы, - параметры).
1-й блок – это реальный объект, точное описание которого неизвестно. 2-й блок – более или менее точное его описание, 3-й – закон управления.
Модель (2-й блок) – приближённая и объект изменяется во времени. Улучшение модели называется идентификацией (повышение её точности). Идентификация имеет 2 стороны:
структурная;
параметрическая.
Под структурной идентификацией понимается приближение структуры модели к реальной так, чтобы она наилучшим образом отражала объект. Так как объекты могут быть самыми различными (механическими, экологическими и др.) нельзя придумать формальных методов структурной идентификации.
4-й блок (рисунок 9.1) отражает параметрическую идентификацию. Параметрическая идентификация – это улучшение значений параметров модели с целью повышения точности модели. Точность всегда понимается как разность между прогнозируемым и тем, что получаем.
5-й блок (рисунок 9.1) осуществляет адаптацию параметров регулятора.
Адаптация означает подстройку параметров регулятора, его самообучение. Параметры регулятора зависят от параметров объекта и обычно выражаются через них. Изначально параметры объекта не всегда известны с достаточной степенью точности или “плывут” во времени, что и вынуждает прибегать к адаптации. Поэтому адаптации – изменению характеристик регулятора – обычно предшествует процедура уточнения характеристик объекта по результатам измерения входных и выходных величин, которая называется идентификацией. Вопросы идентификации и адаптации получили резкое развитие в последние 25-30 лет, благодаря быстрому росту ресурсов цифровых контроллеров с одновременным снижением их стоимости.
Главная отличительная особенность адаптивных систем от систем с постоянными параметрами состоит в том, что они могут автоматически приспосабливаться к изменяющимся внешним условиям, могут обучаться подстройкой регулятора. Используются два основных способа подстройки регулятора.
Если изменяющиеся динамические свойства объекта доступны контролю по измеряемым внешним факторам и известно, как должен настраиваться регулятор в зависимости от параметров объекта, то можно использовать прямой метод настройки или адаптацию по разомкнутому контуру

Рис. 9.2. (А - адаптер, Р – регулятор, О – объект).
Если характеристики объекта измерить и оценить непосредственно нельзя, то используют адаптацию по замкнутому контуру (с обратной связью). В этом случае в систему вводится второй контур управления, который управляет не поведением объекта, а структурой и параметрами регулятора.
Адаптивные регуляторы с обратной связью можно разделить на два класса: самостабилизирующиеся регуляторы и регуляторы с эталонной моделью.
В самонастраивающейся системе имеется идентификатор, который постоянно определяет параметры объекта, и корректор регулятора, который на основании заданного критерия оптимальности сопоставляет текущие значения параметров объекта с теми, на основании которых функционирует регулятор, принимает решение об изменении характеристик регулятора и реализует это решение.
В этой системе можно выделить этапы:
1. Идентификация объекта или системы в целом.
2. Расчет коррекции регулятора.
3. Коррекция (настройка) регулятора, изменение его структуры.